In Vision-Language-Action (VLA) models, action chunking (i.e., executing a sequence of actions without intermediate replanning) is a key technique to improve robotic manipulation abilities. However, a large chunk size reduces the model’s responsiveness to new information, while a small one increases the likelihood of mode-jumping, jerky behavior resulting from discontinuities between chunks.
Therefore, selecting the optimal chunk size is an urgent demand to balance the model's reactivity and consistency. Unfortunately, a dominant trend in current VLA models is an empirical fixed chunk length at inference-time, hindering their superiority and scalability across diverse manipulation tasks.
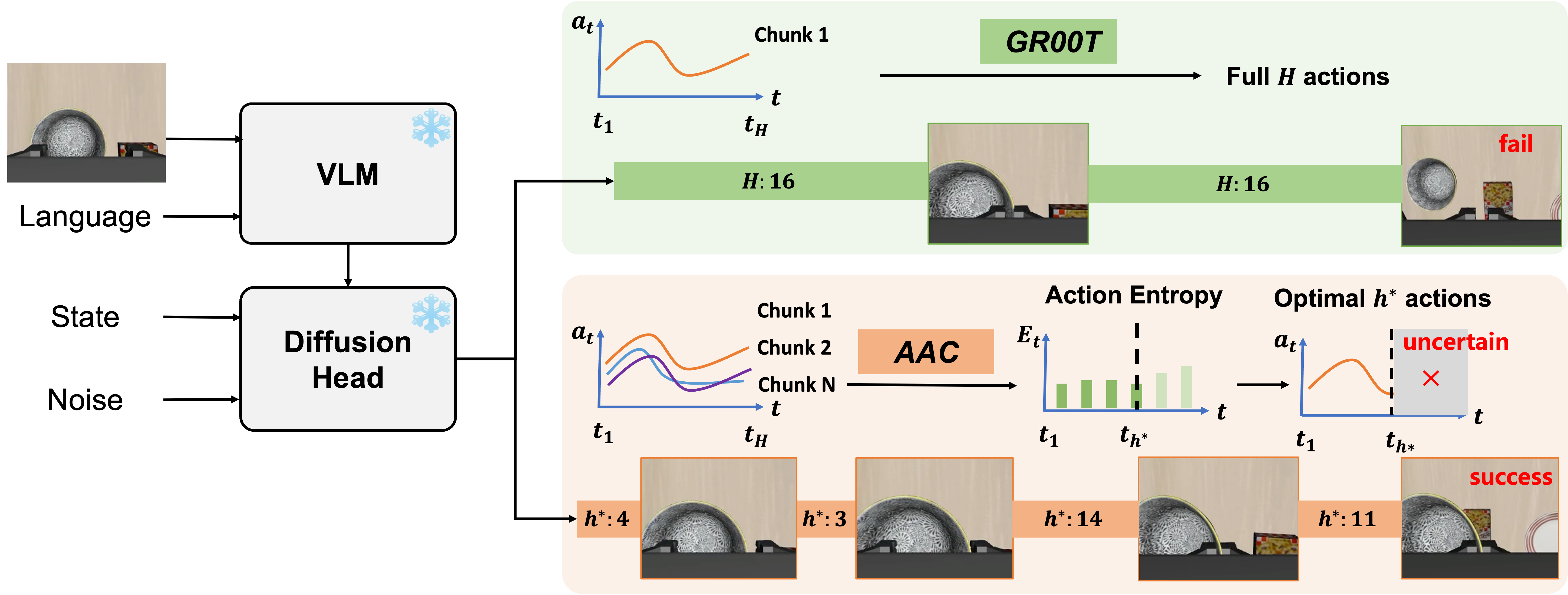
To address this issue, we propose a novel Adaptive Action Chunking (AAC) strategy, which exploits action entropy as the cue to adaptively determine the chunk size based on current predictions. Extensive experiments on a wide range of simulated and real-world robotic manipulation tasks have demonstrated that our approach substantially improves performance over the state-of-the-art alternatives.